

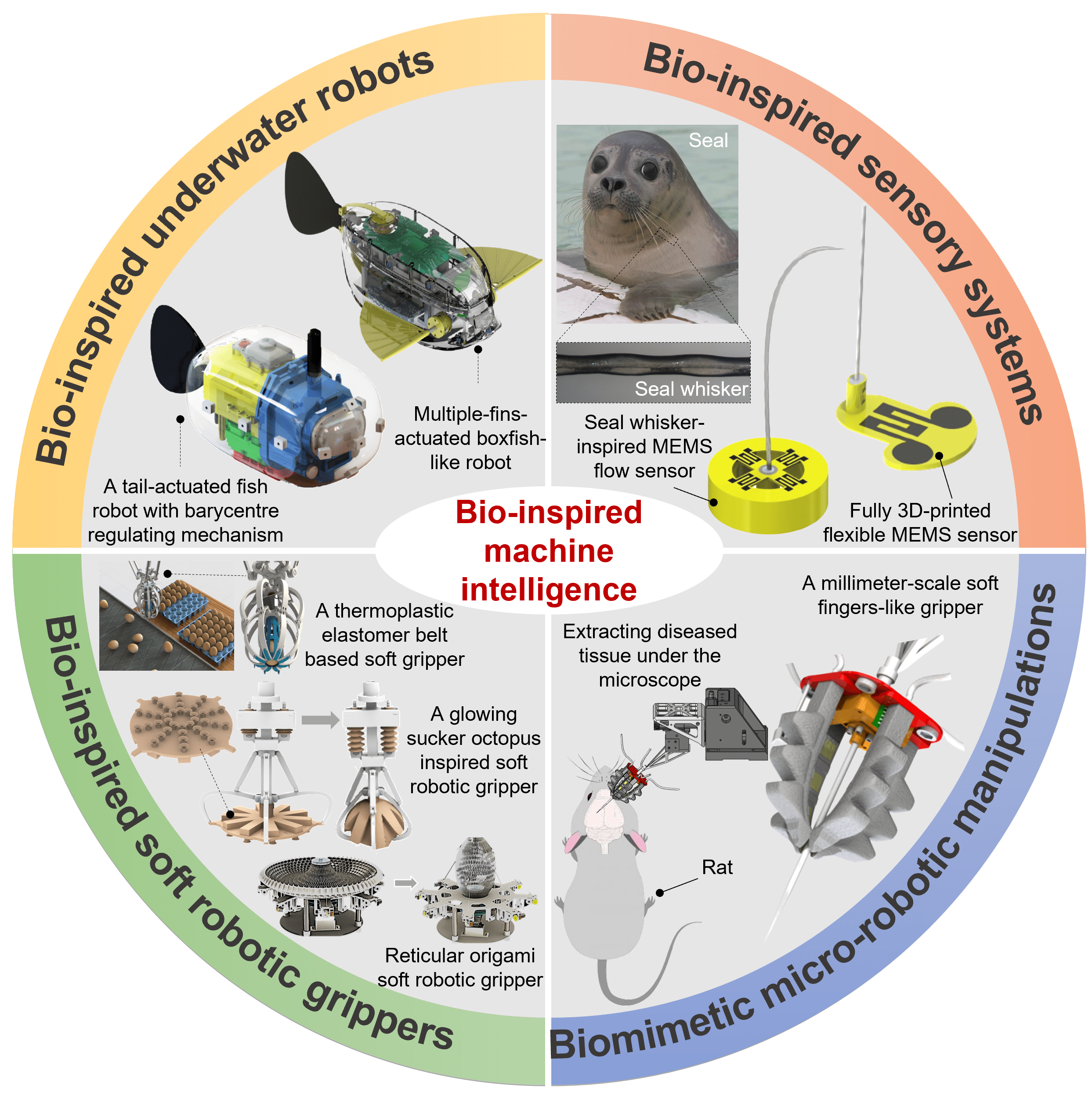
We are interested in bio-inspired machine intelligence. In our group, we focused on research on bio-inspired underwater robots, bio-inspired sensory systems, bio-inspired soft robotic grippers, and robotic manipulation.
The following only presents published research. Welcome to email me to discuss ongoing research topics.
以下仅展示过往已发表的研究,欢迎邮件联系我以了解更多正在进行中的课题。
Videos and photos of relevant works can be found at: www.zheng-xingwen.com/gallery OR https://space.bilibili.com/3493272800463582
Research topics
III. Fish lateral line-inspired motion state estimation and localization of individual robotic fish and relative position and attitude perception of multi-robotic fish (2015-present)
In harsh underwater environments, weak light, chaotic magnetic fields, and complex terrain can interfere with the traditional visual, magnetic, and acoustic sensors of underwater robots, affecting their motions under the water. In contrast, fish can live normally despite the underwater environment described above. For example, deep-sea fish can swim in groups without colliding with each other, and blind-eyed fish can swim in caves without hitting walls. The reason is that fish can detect changes in flow fields with their "lateral line sensory systems" on their body sides, allowing them to perceive the surrounding environment and their companions. This phenomenon has inspired the development of artificial lateral line systems similar to fish in engineering, enabling underwater robots to sense the surrounding environment, typically in harsh underwater environments, providing a new technology for the environmental perception of underwater robots. The lateral perception system of fish is primarily distributed on the head and trunk sides of the fish, comprising neuromasts capable of perceiving flow velocity and pressure. This inspired us to develop an artificial lateral line system with multiple pressure sensors emulating the neuromasts in real fish and place the developed system on a biomimetic robotic fish (IEEE/ASME T-MECH 2022). Aided by the developed artificial lateral line system, we have realized: 1) online motion parameter estimation and localization of one individual robotic fish (Nature Communications 2025, IEEE T-RO 2020); 2) relative distance and attitude perception of multiple robotic fish (B&B 2017, B&B2020, B&B2021, IROS 2019, SMC 2019). Detailed information can be found in the references.

References:
- Xingwen Zheng*, Wei Wang, Minglei Xiong, and Guangming Xie*, Online State Estimation of a Fin-Actuated Underwater Robot Using Artificial Lateral Line System. IEEE Transactions on Robotics (T-RO), 2020.
- Yufan Zhai, Xingwen Zheng, Liming Chao, Shikun Li, Minglei Xiong, Yongxia Jia, Liang Li, Guangming Xie. An Interpretable Approach to Estimate the Self-motion in Fish-like Robots Using Mode Decomposition Analysis. Nature Communications, 2025.
- Xingwen Zheng, Minglei Xiong, Runyu Tian, Junzheng Zheng, Manyi Wang, and Guangming Xie*, Three-Dimensional Dynamic Modeling and Motion Analysis of a Fin-Actuated Robot. IEEE/ASME Transactions on Mechatronics (T-MECH), 2022.
- Xingwen Zheng, Chen Wang, Ruifeng Fan, and Guangming Xie*, Artificial Lateral Line Based Local Sensing between Two Adjacent Robotic Fish. Bioinspiration & Biomimetics (B&B), 2018. (2018-2020 IOP Publishing China Top Cited Paper Award 获2018-2020英国物理学会中国高被引文章奖)
- Xingwen Zheng, Wei Wang, Liang Li, and Guangming Xie*, Artificial Lateral Line Based Relative State Estimation Between an Upstream Oscillating Fin and a Downstream Robotic Fish. Bioinspiration & Biomimetics (B&B), 2020.
- Xingwen Zheng, Manyi Wang, Junzheng Zheng, Runyu Tian, Minglei Xiong, and Guangming Xie, Artificial Lateral Line Based Longitudinal Separation Sensing for Two Swimming Robotic Fish with Leader-Follower Formation. IEEE/RSJ International Conference on Intelligent Robots and Systems (IEEE IROS), 2019. (IEEE Student Support Grant Winner)
- Xingwen Zheng, Minglei Xiong, and Guangming Xie, Data-Driven Modeling for Superficial Hydrodynamic Pressure Variations of Two Swimming Robotic Fish with Leader-Follower Formation. IEEE International Conference on Systems, Man, and Cybernetics (IEEE SMC), 2019. (IEEE Student Support Grant Winner)
- Xingwen Zheng, Hua Chen, Ouyang Jiao, Minglei Xiong, Wei Zhang, and Guangming Xie, Model Predictive Tracking Control Design for a Robotic Fish with Controllable Barycentre. The 45th Annual Conference of the IEEE Industrial Electronics Society (IEEE IECON), 2019.
- Xingwen Zheng, Wei Wang, Chen Wang, Ruifeng Fan, and Guangming Xie, An Introduction of Vision-Based Autonomous Robotic Fish Competition. The 12th World Congress on Intelligent Control and Automation (IEEE WCICA), 2016.
- Yufan Zhai, Xingwen Zheng*, and Guangming Xie*, Fish lateral line inspired flow sensors and flow-aided control: A review. Journal of Bionic Engineering, 2020. (Invited Review 邀请综述)
- Daiyang Jiang, Shuangpeng Wu, Yu Sun, Shuda Lu, Rong Xiong, and Xingwen Zheng*, Data-Driven Motion State Prediction in Robotic Fish: A Model-Free Approach Leveraging Lateral Line Sensor Arrays. IEEE International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (IEEE CYBER), 2025. (Best Application Paper Award Nomination 获最佳应用论文奖提名)
- Guangming Xie* and Xingwen Zheng*. Bionic Sensing with Artificial Lateral Line Systems for Fish-Like Underwater Robots. CRC Press, Taylor & Francis Group, 2022.
- Junzheng Zheng, Xingwen Zheng, Tianhao Zhang, Minglei Xiong, and Guangming Xie*, Dual-Sensor Fusion Based Attitude Holding of a Fin-Actuated Robotic Fish. Bioinspiration & Biomimetics (B&B), 2020.
- More content will be presented later. Welcome to email me to request more details.
II. Flow-sensing mechanisms of seal whiskers and whisker-inspired flow sensors (2019-present)
Revealed by Professor Guido Dehnhardt et al.'s experiments on seal behaviors (Nature, vol. 394, no. 6690 (1998): 235-236; Science, vol. 293, no. 5527 (2001): 102-104), seals can use their whiskers alone to detect the hydrodynamic information resulting from the movements of aquatic animals. Moreover, seals can track the trail of a fish at a distance of 180 meters by using their wavy whiskers alone. This is due to the wavy surface of the seal's whiskers, which prevents periodic vortex streets from shedding behind, thereby suppressing vortex-induced vibrations caused by the reaction force generated by the wake vortex. As a result of this ability, when seals swim, their wavy whiskers do not vibrate significantly, thus reducing the self-generated noise and maintaining their high sensitivity to hydrodynamic stimuli. This performance has inspired engineering applications such as whisker-inspired sensors. A crucial first step in transitioning from nature to engineering when designing whisker-inspired sensors is to explore the structure and mechanisms of real seal whiskers for implementing perceptual functions. In previous works, we conducted a more in-depth exploration of the perception mechanism and geometric structure of seal whiskers to realize the ultrasensitive capability of real seal whiskers in whisker-inspired sensors. Our main works include 1- Proposing mathematical models to describe the 3D wavy whisker structures and discovering signal enhancement effects in whisker arrays (Advanced Science 2023-1, Advanced Science 2023-2, Transducers 2021); 2- Design whisker sensors that can detect flow velocities, angles of attack, and natural frequencies of whiskers, based on the proposed whisker structure (Advanced Functional Materials 2022, MEMS 2022); 3-Creating an open-access database of 144 3D seal whisker models for multidisciplinary studies on seal whiskers (Advanced Science 2025). Detailed information can be found in the references.

Reference:
- Xingwen Zheng*, Amar Kamat, Anastasiia O. Krushynska, Ming Cao, and Ajay Kottapalli*, 3D Printed Graphene Piezoresistive Microelectromechanical System Sensors to Explain the Ultrasensitive Wake Tracking of Wavy Seal Whiskers. Advanced Functional Materials, 2022. (Selected as Cover Article 入选期刊封面文章)
- Xingwen Zheng*, Amar Kamat, Ming Cao, Michael Triantafyllou, and Ajay Kottapalli*, Wonders of Harbor and Grey Seal Whiskers: Morphology, Natural Frequencies, and 3D Modeling, Advanced Science, 2025.
- Xingwen Zheng*, Amar Kamat, Ming Cao, and Ajay Kottapalli*, Wavy whiskers in wakes: Explaining the trail-tracking capabilities of whisker arrays on seal muzzles, Advanced Science, 2023. (Selected as Cover Article 入选期刊封面文章)
- Amar Kamat†, Xingwen Zheng†, Julian Bos, Ming Cao, Michael Triantafyllou, and Ajay Kottapalli*, Undulating seal whiskers evolved optimal wavelength-to-diameter ratio for efficient reduction in vortex-induced vibrations, Advanced Science, 2023. (Selected as Frontispiece 入选期刊卷首文章)
- Xingwen Zheng†, Amar M. Kamat†,*, Ming Cao, and Ajay Giri Prakash Kottapalli*, Creating underwater vision through wavy whiskers: a review of the sensory biology and flow sensing mechanism of seal whiskers. Journal of the Royal Society Interface, 2021.
- Xingwen Zheng, Amar M. Kamat, Ming Cao, and Ajay Giri Prakash Kottapalli, Natural frequency measurement of seal whiskers using a 3D-printed MEMS graphene-based cantilever sensor. IEEE 35th International Conference on Micro Electro Mechanical Systems (IEEE MEMS), 2022.
- Xingwen Zheng, Amar M. Kamat, Vinayak Sagar Harish, Ming Cao, and Ajay Giri Prakash Kottapalli, Optimizing Harbor Seal whisker for Developing 3D-Printed Flow Sensor. The 21st International Conference on Solid-State Sensors, Actuators and Microsystems (IEEE TRANSDUCERS), 2021.
- Xingwen Zheng, Amar Kamat, Ming Cao, Michael Triantafyllou, and Ajay Kottapalli, Wavy Whiskers in Phocid Seals Exhibit High Signal-to-Noise in Sensing Hydrodynamic Flows. IEEE International Conference on Cyborg and Bionic Systems (IEEE CBS), 2024.
- Amar Kamat*, Xingwen Zheng, Bayu Jayawardhana, and Ajay Kottapalli, Bioinspired PDMS-graphene cantilever flow sensors using 3D printing and replica moulding. Nanotechnology, 2020.
- More content will be presented later. Welcome to email me to request more details.
I. Bio-inspired soft robotic grippers and manipulators(2019-present)
In recent years, significant progress has been made in developing robotic grippers and manipulators that can accomplish complex tasks. A critical advancement is incorporating soft mechanisms into robotic systems, which enhance flexibility, adaptability, and agility. In this research project, we designed four bio-inspired soft robotic grippers and manipulators for various robot applications and task requirements, including 1) Reticular origami soft robotic gripper for shape-adaptive and rapid grasping of moving objects, such as spheres that move quickly in sports training (Soft Robotics 2022); 2) Glowing sucker octopus (Stauroteuthis syrtensis)-inspired soft robotic gripper for unscathed grasping of alive underwater organisms (Advanced Science 2022, Research 2024, Cyborg and Bionic Systems 2026); 3) Thermoplastic elastomer belt-based robotic gripper for non-destructive grasping of products on factory assembly lines (IROS 2020); 4) And a 3D-printed centimeter-scale pneumatically actuated robotic manipulator for grasping and moving micro-scale cells and tissues (JSPS Fellowship Program at the University of Tokyo). Detailed information can be found in the references.

Reference:
- Xingwen Zheng, Ningzhe Hou, Pascal Johannes Daniel Dinjens, Ruifeng Wang, Chengyang Dong, and Guangming Xie, A Thermoplastic Elastomer Belt Based Robotic Gripper. IEEE/RSJ International Conference on Intelligent Robots and Systems (IEEE IROS), 2020.
- Xingwen Zheng, Hao Mo, Haoran Yao, and Fumihito Arai, A 3D-Printed Centimeter-Scale Pneumatically Actuated Robotic Manipulator for Micro-Manipulations. International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), 2024. (Best Application Paper Award Nomination 获最佳应用论文奖提名)
- Mingxin Wu, Xingwen Zheng*, Ruosi Liu, Ningzhe Hou, Waqar Hussain Afridi, Rahdar Hussain Afridi, Xin Guo, Jianing Wu, Chen Wang, and Guangming Xie*, Glowing sucker octopus (Stauroteuthis syrtensis)-inspired soft robotic gripper for self-adaptive grasping. Advanced Science, 2022. (as Co-PI; Selected as Cover Article 入选期刊封面文章)
- Ningzhe Hou†, Mingxin Wu†, Qin Zhao, Zhenhua Tang, Kaiwei Wang, Xiaoxian Xu, Xingwen Zheng*, Guangming Xie*, Reticular origami soft robotic gripper for shape-adaptive and rapid grasping, Soft Robotics, 2024. (as Co-PI; Selected as Cover Article 入选期刊封面文章)
- Mingxin Wu, Waqar Hussain Afridi, Jiaxi Wu, Rahdar Hussain Afridi, Kaiwei Wang, Xingwen Zheng, Chen Wang, Guangming Xie. Octopus-Inspired Underwater Soft Robotic Gripper with Crawling and Swimming Capabilities. Research, 2024.
- Mingxin Wu, Yurong Liu, Jiaxi Wu, Waqar Hussain Afridi, Xingwen Zheng, Chen Wang, Guangming Xie, Octopus-inspired underwater gripper with rapid stiffness tuning and robot enabling upward transport. Cyborg and Bionic Systems, 2026.
- More content will be presented later. Welcome to email me to request more details.
Views: 285